| Jewiki unterstützen. Jewiki, die größte Online-Enzyklopädie zum Judentum.
Helfen Sie Jewiki mit einer kleinen oder auch größeren Spende. Einmalig oder regelmäßig, damit die Zukunft von Jewiki gesichert bleibt ... Vielen Dank für Ihr Engagement! (→ Spendenkonten) |
How to read Jewiki in your desired language · Comment lire Jewiki dans votre langue préférée · Cómo leer Jewiki en su idioma preferido · בשפה הרצויה Jewiki כיצד לקרוא · Как читать Jewiki на предпочитаемом вами языке · كيف تقرأ Jewiki باللغة التي تريدها · Como ler o Jewiki na sua língua preferida |
Stoß (Physik)
Ein Stoß ist ein Vorgang, bei dem zwei oder mehr Körper kurzzeitig Kraft aufeinander ausüben. Als Folge ändern die Körper ihren Bewegungszustand, möglicherweise auch ihre Form und Zusammensetzung. In einem Inertialsystem gilt für alle Stoßvorgänge der Impulserhaltungssatz – die Summe aller Impulse bleibt konstant. Der Energieerhaltungssatz umfasst allerdings nicht nur die mechanischen Energieformen, wie inelastische und reaktive Stöße zeigen.
Die grundlegenden Stoßgesetze und ihre mathematische Beschreibung wurden in der Zeit zwischen 1651 und 1655 von Christiaan Huygens aufgestellt. Ihre empirische Gültigkeit sind wesentlich für den Begriff der trägen Masse.

Einteilung mechanischer Stoßprozesse
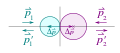
Am Berührpunkt der zwei Körper lässt sich eine Tangentialebene anlegen, die als Berührebene bezeichnet wird. Die zugehörige Normalgerade bildet die Stoßlinie. Die Massen der beiden Körper seien und , ihre Anfangsgeschwindigkeiten und , die Ausgangsgeschwindigkeiten und . Die gemeinsame Geschwindigkeit zum Zeitpunkt der Berührung sei .







Man unterscheidet zwei ideale Grenzfälle, den elastischen Stoß und den plastischen Stoß (auch inelastisch oder unelastisch). Beim elastischen Stoß wird kinetische Energie von Körper zu Körper weitergegeben, bleibt aber insgesamt als kinetische Energie erhalten, denn sie stoßen sich voneinander weg. Beim plastischen Stoß geht dagegen ein Teil der kinetischen Energie in innere Energie über und die Körper stoßen sich nicht voneinander ab. Darum besitzen am Ende beide dieselbe Geschwindigkeit. Alle Zwischenstufen nennt man realer Stoß.
Bei einem geraden Stoß verlaufen die beiden Impulsvektoren parallel zur Stoßlinie, ansonsten handelt es sich um einen schiefen Stoß. Liegt der gemeinsame Schwerpunkt der beiden Körper auf der Stoßlinie, so spricht man von einem zentralen Stoß, andernfalls von einem exzentrischen Stoß.
Darüber hinaus grenzt sich der glatte Stoß vom unglatten Stoß (auch rauer Stoß) ab. Beim rauen Stoß treten Reibungskräfte an der Berührungsfläche auf und die Impulsübertragung erfolgt nicht mehr senkrecht zur Berührebene. Zur weiteren Analyse – unter Betrachtung auch der Rotationsenergie und des Drehimpulses – eignet sich eine Vektorzerlegung in die Tangential- und Normalkomponente.
- Einteilung
Gerader, zentraler, elastischer Stoß

Dito, Schwerpunkt bewegt sich quer zur Stoßrichtung

exzentrischer Stoß

Rauer Stoß




Vereinfachend wird für die folgenden Berechnungen angenommen, dass der Stoß in unendlich kurzer Zeit abläuft und sich währenddessen die Positionen der Stoßpartner nicht verändern. Die Geschwindigkeiten der Stoßpartner ändern sich sprunghaft. Des Weiteren wird die freie Beweglichkeit der Stoßpartner vorausgesetzt, so dass nur geradlinige Bewegungen stattfinden.
Elastischer Stoß
(Idealelastischer Stoß / vollelastischer Stoß)
Zwei Körper stoßen aufeinander, ohne dass dabei Energie in innere Energie, beispielsweise Wärme oder Deformation, umgewandelt wird. Nach dem Energieerhaltungssatz ist also die Summe der Bewegungsenergien (kinetische Energien) vor dem Stoß gleich der Summe der kinetischen Energien (Bewegungsenergien) nach dem Stoß. Dasselbe gilt nach dem Impulserhaltungssatz auch für die vektorielle Summe der Impulse.
Der ideale elastische Stoß bei makroskopischen Objekten ist eine ideale Modellvorstellung. Aufgrund von Reibung und weiteren Einflüssen geht dem System in Wirklichkeit kinetische Energie verloren. Sehr nahe am Modell sind jedoch beispielsweise Billardkugeln oder ein Gummiball.
Bei Stößen von Atomen und/oder Elementarteilchen (siehe auch Kinematik (Teilchenstoß)) gibt es jeweils eine Mindestenergie, die für eine Anregung eines Atoms oder Teilchens oder die Erzeugung und Umwandlung von Teilchen in der Elementarteilchenphysik benötigt wird. Wird diese Energie nicht erreicht, kommt es zum ideal elastischen Stoß.


Nach der Definition von "elastisch" muss die Summe der kinetischen Energie vor und nach dem Stoß gleich hoch sein.

Darin sind die Quadrate der Vektoren sowie die Produkte der Differenz- und Summenvektoren Skalarprodukte.
Zugleich gilt der Impulserhaltungssatz:

Die letzte Zeile bedeutet, dass die Impulsänderungen entgegengesetzt gleich sind. Im Folgenden werden nur die Geschwindigkeitskomponenten in Richtung des Impulsübertrags betrachtet (eindimensional, ohne Vektorpfeile). Orthogonal dazu ändern sich die Impulse und Geschwindigkeiten nicht. Durch Vergleich der Gleichungen (1) und (2) sieht man, dass die mittlere Geschwindigkeit von gleich der von ist. Dies ist gerade die Geschwindigkeit u des gemeinsamen Schwerpunktes (Komponente in Stoßrichtung, quer dazu ist der Vergleich unergiebig, 0 = 0):

Daraus folgt


Für den Sonderfall ergibt sich:



Zweidimensionaler elastischer Stoß

(Schiefer, zentraler, elastischer Stoß)
Der zweidimensionale elastische Stoß beruht prinzipiell auf dem oben geschilderten eindimensionalen elastischen Stoß. Zunächst muss die sogenannte Zentralsteigung berechnet werden. Diese beschreibt die Steigung der Gerade durch die Mittelpunkte der Kugeln. Die Steigung der Tangente durch den Berührpunkt der Kugeln errechnet sich dann durch




Zerlegt man die Bewegungsvektoren und nun in zwei Komponenten parallel zur Tangente und orthogonal dazu, so kann man den zweidimensionalen Stoß zu einem eindimensionalen vereinfachen. Es gilt dann die obige Formel, jedoch nur für die Komponenten in Zentralrichtung.


Daher müssen zunächst die Vektoren und errechnet werden. Dies geschieht anhand der Steigungen , , und .


(Ab hier soll zugunsten einer einfacheren Darstellung auf die Indizes '1' und '2' verzichtet werden.)
Aus folgt:



Für (entsprechendes gilt für und ) kann die zweite Gleichung vereinfacht werden:




Man erhält also das Gleichungssystem
Durch Umformen erhält man:


Für und setzt man entsprechend ein.


Zuletzt müssen nun noch die neuen Vektoren und wie oben angegeben berechnet werden. Im einfachsten Falle, nämlich bei gilt:





Ansonsten muss die obige Formel angewendet werden.
Die neuen Geschwindigkeitsvektoren und werden dann durch Vektoraddition der Vektoren bzw. und bzw. berechnet:








Unelastischer Stoß
(Vollkommen unelastischer Stoß / plastischer Stoß / vollplastischer Stoß / inelastischer Stoß)
Beim unelastischen Stoß wird ein Teil der kinetischen Energie in innere Energie (U) umgewandelt. Im einfachsten Fall geschieht das durch plastische Deformation der beteiligten Körper, aber auch ein Stoßdämpfer erzeugt mechanische Verluste. Beim ideal unelastischen Stoß wird der maximal mögliche Anteil der kinetischen Energie in innere Energie umgewandelt, dabei „kleben“ die beiden Massen nach dem Stoß aneinander und bewegen sich mit derselben Geschwindigkeit, im Folgenden genannt, weiter. Ein Beispiel sind zwei Plastilinkugeln, die nach dem Stoß aneinander haften.


Wiederum gelten die beiden Erhaltungssätze:

- vor dem Stoß:


- nach dem Stoß:


Aus dem Impulserhaltungssatz kann man Folgendes ableiten:


Aus dem Energieerhaltungssatz lässt sich die innere Energie berechnen:


Realer Stoß

(Teilelastischer Stoß / teilplastischer Stoß)
Ein realer Stoß zwischen 2 Massen stellt immer eine Mischform aus ideal elastischem und ideal plastischem Stoß dar. Diese Mischform wird dargestellt durch die Stoßzahl k. Die Stoßzahl wird auch Restitutionskoeffizient genannt.

Die Stoßzahl lässt sich auch über einen Fallversuch bestimmen:

Für einen teilelastischen Stoß mit der Stoßzahl k ergeben sich folgende Geschwindigkeiten:


Die Formänderungsarbeit = Umwandlung der kinetischen Energie lässt sich bestimmen aus:

Mit
- k = 0: vollkommen plastischer Stoß
- k = 1: vollkommen elastischer Stoß
lassen sich die Gleichungen zur Formänderungsarbeit sowie die Gleichungen der Geschwindigkeiten nach dem Stoß zu den obigen Gleichungen im Abschnitt elastischer und plastischer Stoß vereinfachen.
Impulsübertragung bei realen Körpern
Bei einem realen Körper verläuft die Impulsübertragung nicht mehr sprunghaft. Trifft ein Gummiball auf den Boden, verformt er sich zunächst und stößt sich anschließend wieder ab, da er sich wegen seiner Elastizität wieder zurück formt. Der gesamte Ablauf entspricht einem Kraftstoß, bei dem nur ein Stoßpartner betrachtet wird. Weiterhin gilt das dritte Newtonsche Gesetz „actio gleich reactio“:
- .

Bei einem Stoß erfahren also beide Stoßpartner einen Kraftstoß in entgegengesetzten Richtungen.
Superelastischer Stoß
Beim superelastischen Stoß geht innere Energie von mindestens einem der Stoßpartner in kinetische Energie über. Die kinetische Energie ist nach diesem Stoß größer als vor dem Stoß. Die mathematische Behandlung erfolgt wie beim allgemeinen inelastischen Stoß, nur ist .

{kind=link}
Reaktiver Stoß
Beim reaktiven Stoß kommt es zu Reaktionen, wie z. B. chemischen Reaktionen, oder zur Erzeugung neuer Teilchen durch Stöße hochenergetischer Teilchen in der Elementarteilchenphysik. Dabei muss berücksichtigt werden, dass vor und nach dem Stoß unterschiedliche Teilchen zu Energie und Impuls beitragen. Es ändern sich also neben der Geschwindigkeit auch die Massen und unter Umständen die Anzahl der Teilchen.
Eine Art des reaktiven Stoßes ist z. B. der Ladungsaustausch, ein atomphysikalischer Prozess, bei dem während eines Stoßes zwischen Atomen, Molekülen oder Ionen ein oder mehrere Elektronen ausgetauscht werden. Mit großer Wahrscheinlichkeit werden dabei die Elektronen auf den Stoßpartner mit der positiveren Ladung übergehen. So können z. B. im Sonnenwind enthaltene positive Ionen (siehe auch hochgeladenes Ion) beim Durchgang durch die einen Kometen umgebende dünne Gasatmosphäre Elektronen einfangen und dabei Strahlung, u. a. im Röntgenbereich, emittieren.
Streuung
In der Teilchenphysik, Atomphysik, Kernphysik oder wenn Photonen beteiligt sind, spricht man auch von Streuung. Auch hier bedeutet inelastische Streuung (inelastischer Stoß), dass die kinetische Energie nicht als solche erhalten bleibt, sondern teilweise z. B. in Anregungsenergie verwandelt oder zum Aufbrechen von Bindungen verwendet wird. Wenn ein Photon an einer inelastischen Streuung beteiligt ist, ändert sich im Allgemeinen seine Wellenlänge. Näheres siehe Streuung und Streutheorie.
Siehe auch
- Kinematik (Teilchenstoß)
- Stoßwelle (Schockwelle) – eine energiereiche Druckwelle
- Verdichtungsstoß – Stoßwelle in überschallschneller Strömung
- Stoß zweiter Art
Literatur
- Christiaan Huygens: Christiaan Huygens' nachgelassene Abhandlungen: Über die Bewegung der Körper durch den Stoss : Über die Centrifugalkraft. Herausgegeben von Felix Hausdorff. Akademische Verlagsgesellschaft, Leipzig, um 1921.
Weblinks
- Der elastische Stoß in drei Dimensionen einschließlich Herleitung unter Benutzung der Impuls- und Energieerhaltung
[[Kategorie: Atomphysik]
| Dieser Artikel basiert ursprünglich auf dem Artikel Stoß (Physik) aus der freien Enzyklopädie Wikipedia und steht unter der Doppellizenz GNU-Lizenz für freie Dokumentation und Creative Commons CC-BY-SA 3.0 Unported. In der Wikipedia ist eine Liste der ursprünglichen Wikipedia-Autoren verfügbar. |